In dit tutorial artikel leer je hoe een stappenmotor werkt. We zullen de basis werkingsprincipes van stappenmotoren, hun aandrijfmodi en de steppersoorten naar constructie behandelen. U kunt de volgende video bekijken of het geschreven artikel lezen.
Werkingsprincipe
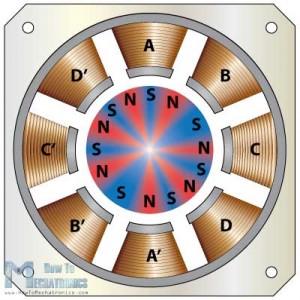
Stepper motor is een borstelloze gelijkstroommotor die in stappen ronddraait. Dit is zeer nuttig omdat het nauwkeurig kan worden gepositioneerd zonder enige feedbacksensor, wat een open-loop regelaar vertegenwoordigt. De stappenmotor bestaat uit een rotor die meestal een permanente magneet is en die omgeven is door de wikkelingen van de stator. Wanneer we de wikkelingen stap voor stap in een bepaalde volgorde activeren en er stroom door laten lopen, zullen ze de stator magnetiseren en respectievelijk elektromagnetische polen maken die de motor zullen aandrijven. Dat’ is dus het basis werkingsprincipe van de stappenmotoren.
Aandrijvingsmodi
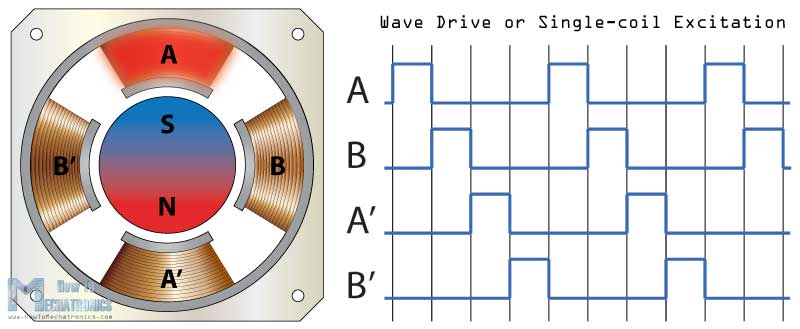
Er zijn verschillende manieren om de stappenmotor aan te drijven. De eerste is de Wave Drive of Single-Coil Excitation. In deze modus activeren we slechts één spoel per keer, wat betekent dat in dit voorbeeld van een motor met 4 spoelen, de rotor een volledige cyclus in 4 stappen maakt.
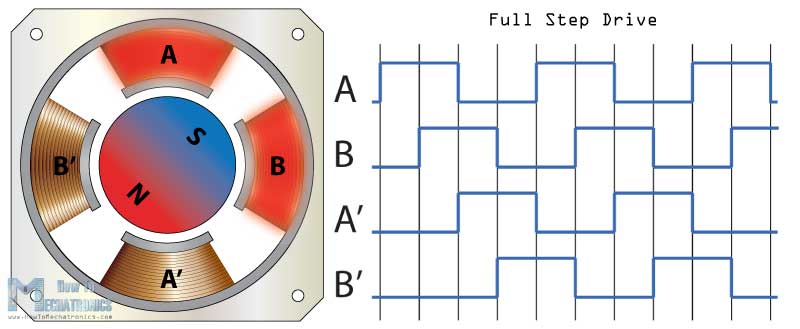
De volgende is de Full step drive modus die een veel hoger koppel levert omdat we altijd 2 actieve spoelen hebben op een bepaald moment. Dit verbetert echter niet de resolutie van de stappenmotor en ook hier zal de rotor een volledige cyclus in 4 stappen maken.
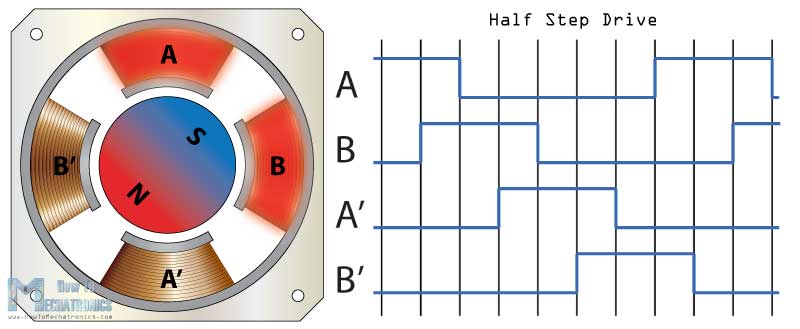
Voor het verhogen van de resolutie van de stappenmotor gebruiken we de Half Step Drive mode. Deze modus is eigenlijk een combinatie van de vorige twee modi.

Hier hebben we één actieve spoel gevolgd door 2 actieve spoelen en dan weer één actieve spoel gevolgd door 2 actieve spoelen enzovoorts. Dus met deze modus krijgen we een dubbele resolutie met dezelfde constructie. Nu zal de rotor een volledige cyclus maken in 8 stappen.
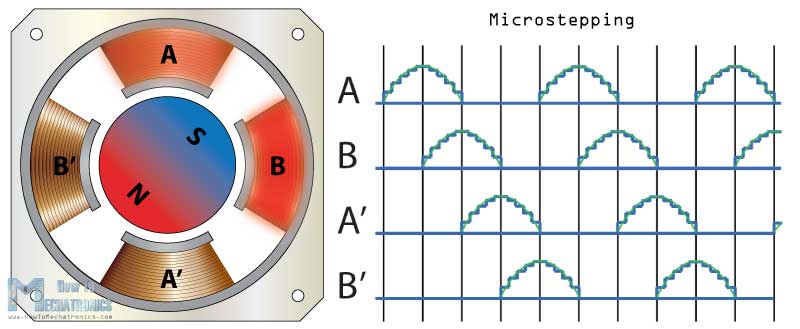
 De meest gebruikte methode om stappenmotoren aan te sturen is tegenwoordig echter het Microstepping. In deze mode geven we variabele gecontroleerde stroom aan de spoelen in de vorm van een sin-golf. Dit zorgt voor een soepele beweging van de rotor, vermindert de spanning op de onderdelen en verhoogt de nauwkeurigheid van de stappenmotor.
De meest gebruikte methode om stappenmotoren aan te sturen is tegenwoordig echter het Microstepping. In deze mode geven we variabele gecontroleerde stroom aan de spoelen in de vorm van een sin-golf. Dit zorgt voor een soepele beweging van de rotor, vermindert de spanning op de onderdelen en verhoogt de nauwkeurigheid van de stappenmotor.
Een andere manier om de resolutie van de stappenmotor te verhogen is door het aantal polen van de rotor en het aantal polen van de stator te verhogen.
Stepper Motor Types naar Constructie
Naar constructie zijn er 3 verschillende soorten stappenmotoren: permanente magneet stappenmotor, variabele reluctantie stappenmotor en hybride synchrone stappenmotor.
De stappenmotor met permanente magneet heeft een rotor met permanente magneet die wordt aangedreven door de statordraaistroomwikkeling. Ze creëren tegengestelde polen ten opzichte van de polen van de rotor die de rotor voortstuwt.
Het volgende type, de Variabele Reluctante stappenmotor gebruikt een niet-magnetiserende rotor van zacht ijzer. De rotor heeft tanden die uit de stator staan en als we de wikkelingen in een bepaalde volgorde activeren beweegt de rotor respectievelijk zodat er een minimale gab tussen de stator en de tanden van de rotor is

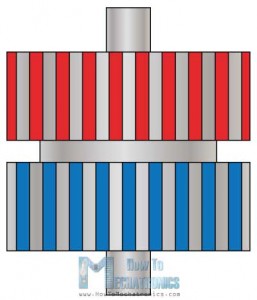
De Hybride Synchrone motor is een combinatie van de vorige twee stappenmotoren. Hij heeft een rotor met permanente magneet en ook een getande stator. De rotor heeft twee secties, die tegengesteld zijn in polariteit en waarvan de tanden zijn verschoven zoals hier wordt getoond.
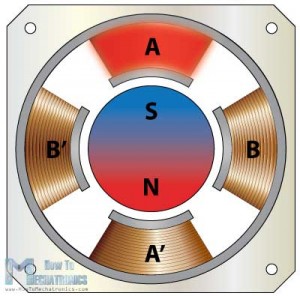
Dit is een vooraanzicht van een veelgebruikte hybride stappenmotor die 8 polen op de stator heeft die worden geactiveerd door 2 wikkelingen, A en B. Dus als we wikkeling A activeren, zullen we 4 polen magnetiseren, waarvan er twee een zuidpolariteit hebben en twee een noordpolariteit.

We kunnen zien dat op deze manier de tanden van de rotors zijn uitgelijnd met de tanden van de polen A en niet uitgelijnd met de tanden van de polen B. Dat betekent dat als we in de volgende stap de polen A uitschakelen en de polen B activeren, de rotor tegen de klok in zal bewegen en zijn tanden zullen uitlijnen met de tanden van de polen B.

Als we de polen in een bepaalde volgorde blijven activeren, zal de rotor continu bewegen. Hier kunnen we ook verschillende aandrijfmodi gebruiken zoals de wave drive, full step drive, half step drive en microstepping om de resolutie van de stappenmotor nog verder te verhogen.