Dans cet article tutoriel, vous apprendrez comment fonctionne un moteur pas à pas. Nous couvrirons les principes de fonctionnement de base des moteurs pas à pas, leurs modes de pilotage et les types de pas à pas par construction. Vous pouvez regarder la vidéo suivante ou lire l’article écrit.
Principe de fonctionnement
Le moteur pas à pas est un moteur à courant continu sans balais qui tourne par étapes. Il est très utile car il peut être positionné précisément sans aucun capteur de retour, ce qui représente un contrôleur en boucle ouverte. Le moteur pas à pas est composé d’un rotor qui est généralement un aimant permanent et qui est entouré par les enroulements du stator. Lorsque nous activons les enroulements étape par étape dans un ordre particulier et que nous laissons un courant circuler à travers eux, ils magnétisent le stator et créent des pôles électromagnétiques respectivement, ce qui entraîne la propulsion du moteur. Donc, c’est’ le principe de fonctionnement de base des moteurs pas à pas.
Modes d’entraînement
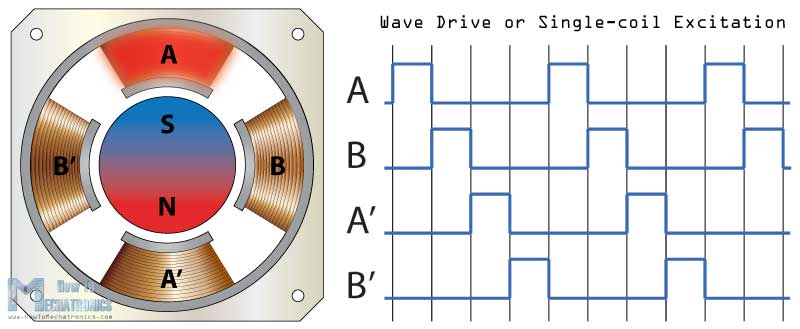
Il existe plusieurs façons différentes d’entraîner le moteur pas à pas. La première est le Wave Drive ou l’excitation à une seule bobine. Dans ce mode, nous n’activons qu’une bobine à la fois, ce qui signifie que pour cet exemple de moteur avec 4 bobines, le rotor fera un cycle complet en 4 étapes.
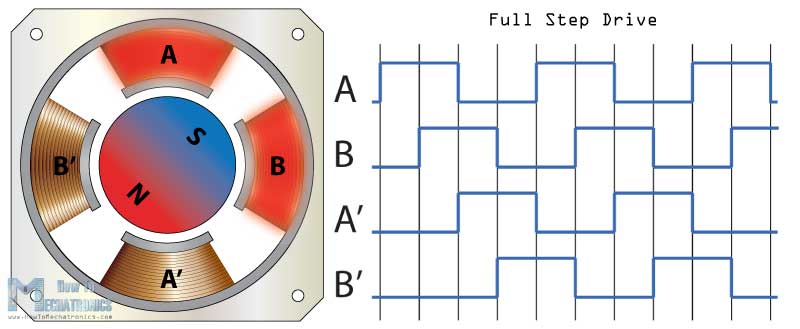
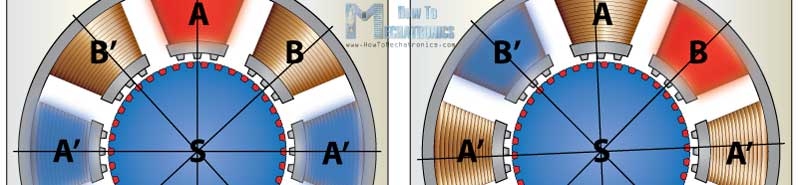
Vient ensuite le mode d’entraînement Full step qui fournit un couple de sortie beaucoup plus élevé car nous avons toujours 2 bobines actives à un moment donné. Cependant cela n’améliore pas la résolution du stepper et encore une fois le rotor fera un cycle complet en 4 étapes.
Pour augmenter la résolution du stepper nous utilisons le mode Half Step Drive. Ce mode est en fait une combinaison des deux modes précédents.

Ici nous avons une bobine active suivie de 2 bobines actives et encore une bobine active suivie de 2 bobines actives et ainsi de suite. Donc avec ce mode nous obtenons le double de la résolution avec la même construction. Maintenant, le rotor fera un cycle complet en 8 étapes.
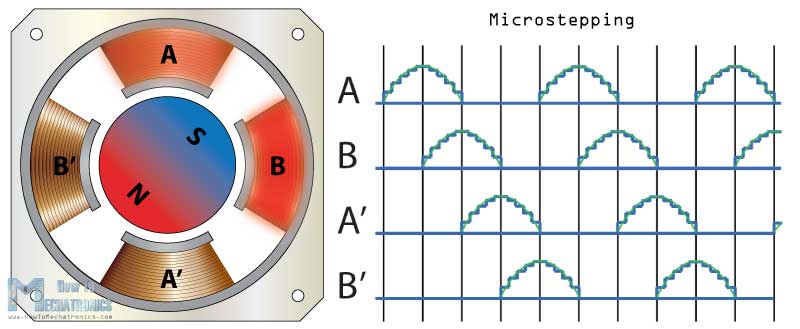
 Cependant, la méthode la plus courante pour contrôler les moteurs pas à pas de nos jours est le micropas. Dans ce mode, nous fournissons un courant contrôlé variable aux bobines sous la forme d’une onde sinusoïdale. Cela fournira un mouvement régulier du rotor, diminuera le stress des pièces et augmentera la précision du moteur pas à pas.
Cependant, la méthode la plus courante pour contrôler les moteurs pas à pas de nos jours est le micropas. Dans ce mode, nous fournissons un courant contrôlé variable aux bobines sous la forme d’une onde sinusoïdale. Cela fournira un mouvement régulier du rotor, diminuera le stress des pièces et augmentera la précision du moteur pas à pas.
Une autre façon d’augmenter la résolution du moteur pas à pas est d’augmenter le nombre de pôles du rotor et le nombre de pôles du stator.

Types de moteurs pas à pas par construction
Par construction, il existe 3 types différents de moteurs pas à pas : le moteur pas à pas à aimant permanent, le moteur pas à pas à réluctance variable et le moteur pas à pas synchrone hybride.
Le stepper à aimant permanent possède un rotor à aimant permanent qui est entraîné par les enroulements des stators. Ceux-ci créent des pôles de polarité opposée par rapport aux pôles du rotor qui propulse ce dernier.

Le type suivant, le moteur pas à pas à réluctance variable utilise un rotor en fer doux non magnétisé. Le rotor a des dents qui sont décalées par rapport au stator et lorsque nous activons les enroulements dans un ordre particulier, le rotor se déplace respectivement de manière à avoir un gab minimum entre le stator et les dents du rotor
Le moteur synchrone hybride est des combinaisons des deux steppers précédents. Il possède un rotor denté à aimant permanent et également un stator denté. Le rotor a deux sections, qui sont opposées en polarité et leurs dents sont décalées comme indiqué ici.

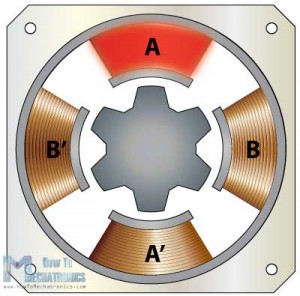
C’est une vue de face d’un moteur pas à pas hybride couramment utilisé qui a 8 pôles sur le stator qui sont activés par 2 enroulements, A et B. Ainsi, si nous activons l’enroulement A, nous magnétiserons 4 pôles dont deux d’entre eux auront une polarité Sud et deux d’entre eux une polarité Nord.

Nous pouvons voir que de cette manière les dents des rotors sont alignées avec les dents des pôles A et non alignées avec les dents des pôles B. Cela signifie que dans l’étape suivante, lorsque nous éteindrons les pôles A et activerons les pôles B, le rotor se déplacera dans le sens inverse des aiguilles d’une montre et ses dents seront alignées avec les dents des pôles B.
Si nous continuons à activer les pôles dans un ordre particulier, le rotor se déplacera continuellement. Ici, nous pouvons également utiliser différents modes d’entraînement comme l’entraînement par onde, l’entraînement par pas complet, l’entraînement par demi-pas et le micropas pour augmenter encore plus la résolution du moteur pas à pas.