In questo articolo tutorial imparerete come funziona un motore passo-passo. Tratteremo i principi di base del funzionamento dei motori passo-passo, le loro modalità di guida e i tipi di motori passo-passo per costruzione. Puoi guardare il seguente video o leggere l’articolo scritto.
Principio di funzionamento
Il motore stepper è un motore DC senza spazzole che ruota a passi. È molto utile perché può essere posizionato con precisione senza alcun sensore di feedback, il che rappresenta un controller ad anello aperto. Il motore passo-passo è composto da un rotore che è generalmente un magnete permanente ed è circondato dagli avvolgimenti dello statore. Quando attiviamo gli avvolgimenti passo dopo passo in un ordine particolare e facciamo scorrere una corrente attraverso di essi, essi magnetizzano lo statore e creano rispettivamente dei poli elettromagnetici che causano la propulsione del motore. Questo è il principio di funzionamento di base dei motori passo-passo.
Modalità di pilotaggio
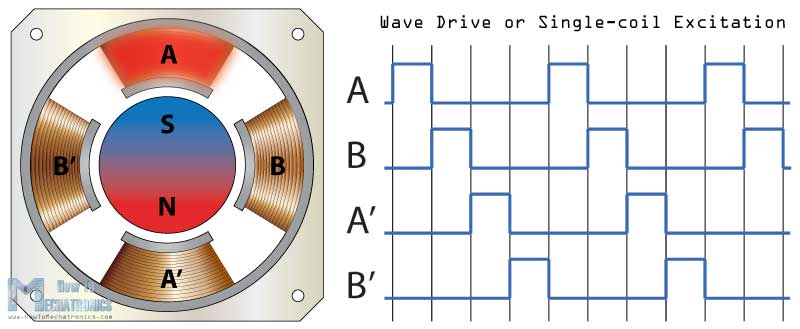
Ci sono diversi modi di pilotare il motore passo-passo. Il primo è l’azionamento a onda o eccitazione a bobina singola. In questa modalità attiviamo solo una bobina alla volta, il che significa che per questo esempio di motore con 4 bobine, il rotore farà un ciclo completo in 4 passi.
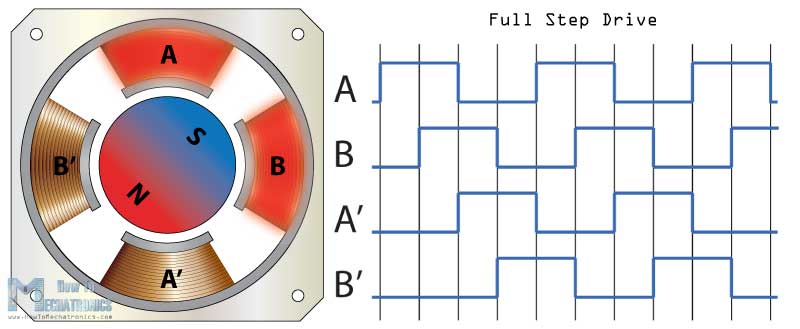
Successiva è la modalità Full step drive che fornisce una coppia in uscita molto più alta perché abbiamo sempre 2 bobine attive in un dato momento. Tuttavia questo non migliora la risoluzione dello stepper e di nuovo il rotore farà un ciclo completo in 4 passi.
Per aumentare la risoluzione dello stepper usiamo la modalità Half Step Drive. Questa modalità è in realtà una combinazione delle due modalità precedenti.

Qui abbiamo una bobina attiva seguita da 2 bobine attive e poi ancora una bobina attiva seguita da 2 bobine attive e così via. Quindi con questa modalità otteniamo il doppio della risoluzione con la stessa costruzione. Ora il rotore farà un ciclo completo in 8 passi.
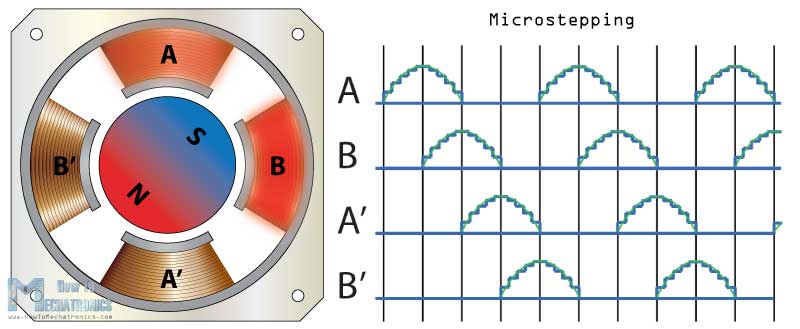
 Tuttavia il metodo più comune di controllo dei motori passo passo al giorno d’oggi è il Microstepping. In questa modalità forniamo una corrente variabile controllata alle bobine sotto forma di onda sin. Questo fornirà un movimento regolare del rotore, diminuirà lo stress delle parti e aumenterà la precisione del motore passo-passo.
Tuttavia il metodo più comune di controllo dei motori passo passo al giorno d’oggi è il Microstepping. In questa modalità forniamo una corrente variabile controllata alle bobine sotto forma di onda sin. Questo fornirà un movimento regolare del rotore, diminuirà lo stress delle parti e aumenterà la precisione del motore passo-passo.
Un altro modo per aumentare la risoluzione del motore passo-passo è aumentare il numero dei poli del rotore e il numero dei poli dello statore.

Tipi di motori passo-passo per costruzione
Per costruzione ci sono 3 diversi tipi di motori passo-passo: passo-passo a magnete permanente, passo-passo a riluttanza variabile e motore sincrono ibrido.
Il motore stepper a magnete permanente ha un rotore a magnete permanente che è guidato dagli avvolgimenti dello statore. Creano poli di polarità opposta rispetto ai poli del rotore che spinge il rotore.

Il tipo successivo, il motore passo-passo a riluttanza variabile usa un rotore in ferro dolce non magnetizzato. Il rotore ha dei denti che sono sfalsati rispetto allo statore e quando attiviamo gli avvolgimenti in un ordine particolare il rotore si muove rispettivamente in modo da avere il minimo gab tra lo statore e i denti del rotore

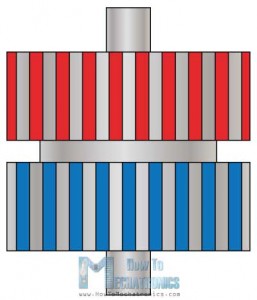
Il motore ibrido sincrono è una combinazione dei due precedenti stepper. Ha un rotore dentato a magnete permanente e anche uno statore dentato. Il rotore ha due sezioni, che sono opposte in polarità e i loro denti sono sfalsati come mostrato qui.
Questa è una vista frontale di un motore passo-passo ibrido comunemente usato che ha 8 poli sullo statore che sono attivati da 2 avvolgimenti, A e B. Quindi, se attiviamo l’avvolgimento A, magnetizzeremo 4 poli di cui due avranno polarità Sud e due polarità Nord.

Possiamo vedere che in questo modo i denti dei rotori sono allineati con i denti dei poli A e non allineati con i denti dei poli B. Ciò significa che nella fase successiva, quando spegniamo i poli A e attiviamo i poli B, il rotore si muoverà in senso antiorario e i suoi denti si allineeranno con i denti dei poli B.

Se continuiamo ad attivare i poli in un ordine particolare il rotore si muoverà continuamente. Qui possiamo anche usare diverse modalità di guida come l’azionamento a onda, l’azionamento a passo completo, l’azionamento a mezzo passo e il microstepping per aumentare ulteriormente la risoluzione del motore passo-passo.