このチュートリアル記事では、ステッピングモーターの動作について学びます。 ステッパーモーターの基本的な動作原理、駆動モード、構造によるステッパーの種類について説明します。
動作原理
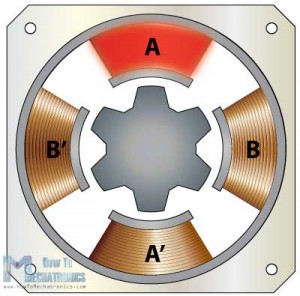
ステッピングモーターは、ステップ状に回転するブラシレスDCモーターです。 これは、オープンループコントローラを表すフィードバックセンサなしで正確な位置に配置できるため、非常に便利です。 ステッピングモーターは、一般的に永久磁石であるローターで構成され、それをステーターの巻線が取り囲んでいます。 巻線を特定の順序で段階的に作動させて電流を流すと、ステーターが磁化され、それぞれ電磁極が作られ、モーターに推進力が与えられる。
駆動モード
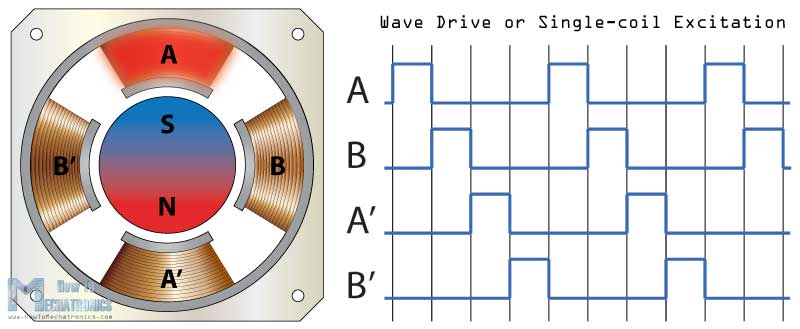
ステッピングモーターの駆動方法にはいくつかの種類があります。 最初のものは、ウェーブ・ドライブまたはシングル・コイル・エキサイテーションです。
次に、フルステップ駆動モードです。これは、常に2つのアクティブなコイルがあるため、はるかに高いトルク出力が得られます。

ステッパーの解像度を上げるには、ハーフステップドライブモードを使用します。

ここでは、1つのアクティブなコイルに2つのアクティブなコイルを重ね、さらに1つのアクティブなコイルに2つのアクティブなコイルを重ねる、といった具合です。 このモードでは、同じ構造で2倍の解像度を得ることができます。
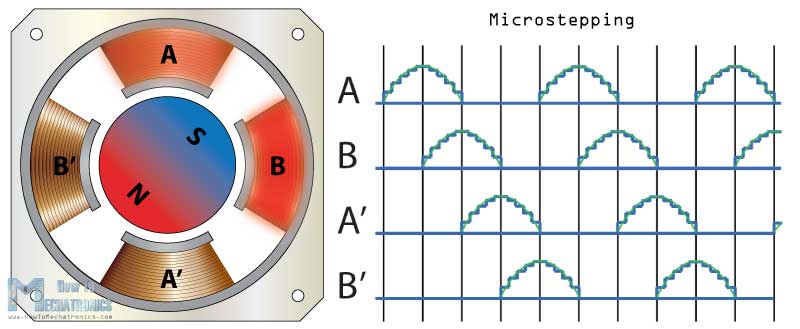
 しかし、最近のステッピングモーターの制御方法で最も一般的なのは、マイクロステッピングです。 このモードでは、コイルに正弦波の形で可変制御の電流を供給します。
しかし、最近のステッピングモーターの制御方法で最も一般的なのは、マイクロステッピングです。 このモードでは、コイルに正弦波の形で可変制御の電流を供給します。
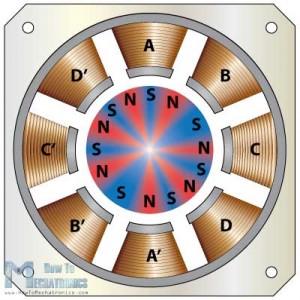
ステッピングモーターの解像度を上げるもう一つの方法は、ローターのポールとステーターのポールの数を増やすことです。
構造別ステッピングモーターの種類
ステッピングモーターには構造上、永久磁石式ステッピングモーター、可変リラクタンス式ステッピングモーター、ハイブリッド同期式ステッピングモーターの3つの種類があります。
永久磁石ステッパーは、永久磁石のローターがステーターの巻線によって駆動されます。
次のタイプである可変リラクタンス式ステッピングモーターは、非磁性の軟鉄ローターを使用しています。 ローターにはステーターからオフセットされた歯があり、特定の順序で巻線を作動させると、ローターはステーターとローターの歯の間のギャップが最小になるようにそれぞれ移動します
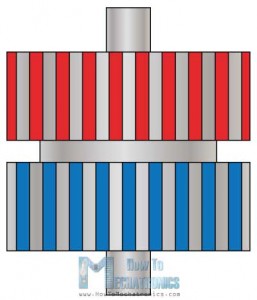
ハイブリッド同期モーターは、前の2つのステッパーの組み合わせです。 永久磁石の歯付きローターと、歯付きステーターを備えています。
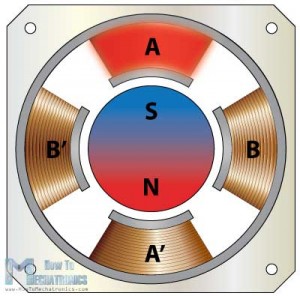
これは一般的に使用されているハイブリッドステッピングモーターの正面図で、ステーターには8つの極があり、AとBの2つの巻線によって作動します。 したがって、巻線 A をアクティブにすると、4 つの極が磁化され、そのうち 2 つは南極、2 つは北極になります。
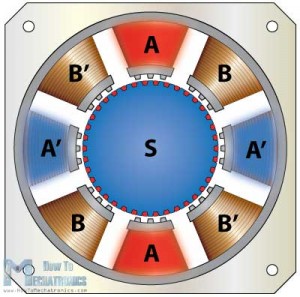
このようにして、ローターの歯はA極の歯と整列し、B極の歯とは整列しないことがわかります。
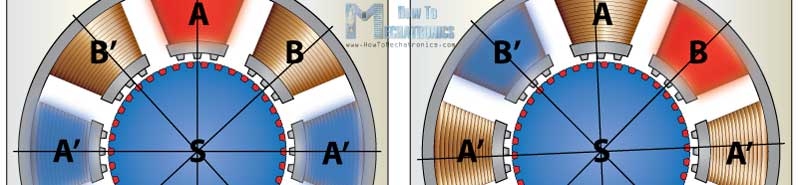
特定の順序で極を作動させ続けると、ローターは連続的に動きます。 ここでは、ステッピングモーターの解像度をさらに高めるために、ウェーブドライブ、フルステップドライブ、ハーフステップドライブ、マイクロステップなど、さまざまな駆動モードを使用することもできます
。