ASME Y14.5は、包括的なGD&Tシステムに必要なすべての情報を含む、確立され広く使用されているGD&T規格です。
GD&Tと標準化
Geometric Dimensioning and Tolerancing (略してGD&T)は、技術的な図面の情報を伝達するために使用されるシンボルの言語です。 書かれた言語で正確なコミュニケーションをとるためには、書き手と読み手がその言語のシンボルと構造について同じ理解をしていなければなりません。 そのためには、その言語の正しい使い方を記した文書を発行することが有効である。 この概念は標準化と呼ばれ、GD&Tにとっても他の言語と同様に重要なものです。 あなたの会社で使われているGD&Tの標準を知っておくことは、図面の情報が正しく解釈されていることを確認するために不可欠です。
現在使用されているGeometric Dimensioning and Tolerancingの主な規格は2つあります。 国際標準化機構(ISO)が発行している「幾何学的製品仕様(Geometrical Product Specifications)」または「ISO GPS規格」と呼ばれる規格群と、米国機械学会が発行している「ASME Y14.5規格」です。 この記事では、ASME Y14.5規格に焦点を当て、その歴史、目的、内容について簡単に説明します。
ASMEとY14.5の歴史
ASMEはThe American Society of Mechanical Engineersの頭文字をとったもので、工学的知識の進歩、標準化、普及を目的として設立された非営利団体です。 ASMEの中では、Y14 Engineering Product Definition and Related Documentation Practices委員会のSubcommittee 5が、Y14.5規格の維持と更新を担当しています。
現代のASME寸法許容差規格は、そのルーツを1949年頃の軍事規格MIL-STD-8に遡ることができますが、GD&Tを完全に組み込んだ最初の規格として一般的に受け入れられているのは、1982年のY14.5の出版物です。 それ以来、ASME規格は約10年間隔で更新され、最近では2018年に更新されました:
1982年 – ANSI Y14.5M
1994年 – ASME Y14.5M
2009年 – ASME Y14.5
2018 – ASME Y14.5
米国、カナダ、オーストラリアでASME規格を採用している企業のうち、約半数が2009年版を使用しており、4分の1以上がまだ1994年発行のものを使用しています。 2018年版を使用している企業の割合は比較的少ないです。 GD&T basicsでは2009年版を使用しており、この記事はそのバージョンに基づいています。
規格の概要と構成
ASMEのウェブサイトでは、Y14.5規格について次のように説明しています:
「Y14.5規格は、幾何学的寸法と公差(GD&T)の設計言語の権威あるガイドラインと考えられています。
この規格は、エンジニアリング図面、デジタルデータファイルで定義されたモデル、および関連文書で使用されるGD&Tと関連する要求事項を記述し、解釈するためのシンボル、ルール、定義、要求事項、デフォルト、および推奨されるプラクティスを確立しています。”
この規格は、図面の仕様と解釈に統一性を持たせ、製造工程における推測の余地を減らすことを目的としています。
この規格は、図面の仕様や解釈を統一し、製造工程における当て推量を減らすことを目的としています。 この規格は、意図された形状を伝えることに焦点を当てており、形状の検査や測定については言及していないことは注目に値します。 その代わりに、ユーザーにはフィクスチャとゲージングの原則に関する別の規格 (ASME Y14.43) を案内しています。
Y14.5規格の内容の大部分は、簡単な序文、付録AからE、および索引を含む9つの主要セクションに分かれています。 本文の最初の3つのセクションには、GD&Tの一般的な原則に関する情報が含まれており、4つ目のセクションではデータムリファレンスフレームに関する情報が含まれています。 第5節から第9節までは、それぞれ以下の基本的なカテゴリの一つのトレランスについて説明しています。 第5節から第9節までは、それぞれ次の基本カテゴリの1つである「形状」、「方向」、「位置」、「輪郭」、「振れ」の公差について説明します。
Section 1 – SCOPE, DEFINITIONS, AND GENERAL DIMENSIONING
このセクションでは、上記で詳細に説明した規格の範囲と意図を概説しています。 また、本規格で使用されている主要な用語の定義を示しています。 さらに、このセクションでは、寸法記入の基本的なルールを概説し、多くの異なるタイプの機能に対する適切な寸法記入を示す多くの例を提供しています。
セクション 2 – 一般的な許容範囲と関連する原則
この部分では、直線的な寸法と角度的な寸法の許容範囲を表現するための慣習が確立されています。 また、修飾語や重要な原則を紹介します。
第3項「記号法」
この項では、図面上で幾何学的特性やその他の寸法要件を指定するための記号を規定しています。 以下の表は、幾何学的特性のための記号を示しています。 この他にも、データム、モディファイア、カウンターボア、カウンターシンク、テーパーなどの記号が多数掲載されており、説明されています。
| 許容範囲のタイプ | シンボル | 規格内の位置 | GD&T基礎記号ページ |
| 形状 | 直進性 |
5.4.4.1 | www.gdandtbasics.com/straightness/ |
| Form | Flatness |
5.4.2 | www.gdandtbasics.com/flatness/ |
| 形 | 円形 |
5.4.3 | www.gdandtbasics.com/circularity/ |
| 形 | 円筒度 |
5.4.4 | www.gdandtbasics.com/cylindricity/ |
| 向き | 角度 | 6.3.1 | www.gdandtbasics.com/angularity/ |
| 向き | 垂直性 | 6.3.3 | www.gdandtbasics.com/perpendicularity/ |
| 向き | 平行性 |
6.3.2 | www.gdandtbasics.com/parallelism/ |
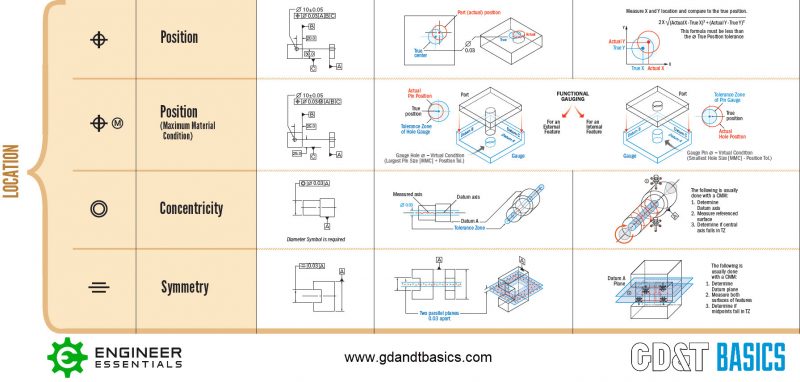
| 場所 | 位置 | 7.2 | www.gdandtbasics.com/true-position/ |
| Location | Concentricity  |
7.6.4 | www.gdandtbasics.com/concentricity/ |
| Location | Symmetry  |
7.7.2 | www.gdandtbasics.com/symmetry/ |
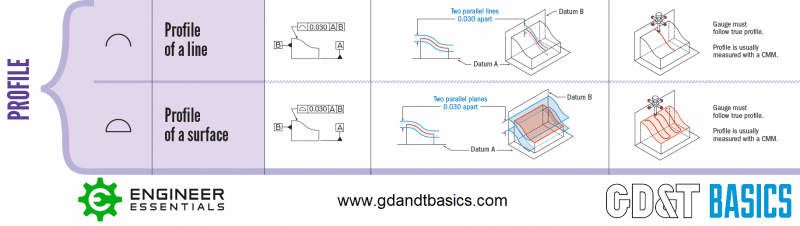
| プロファイル | ラインのプロファイル  |
8.2.1.2 | www.gdandtbasics.com/profile-of-a-line/ |
| プロファイル | 表面のプロファイル |
8.2.1.1 | www.gdandtbasics.com/profile-of-a-surface/ |
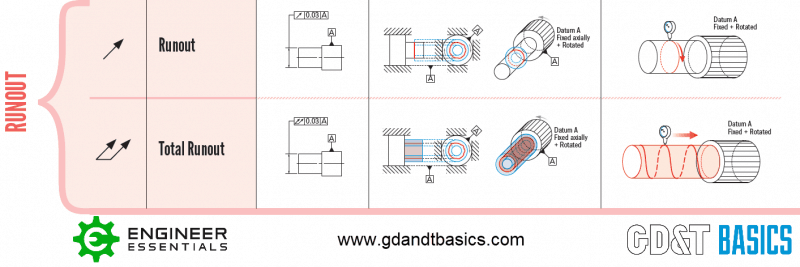
| ランアウト | 円形のランアウト  |
9.4.1 | www.gdandtbasics.com/runout/ |
| ランアウト | トータルランアウト  |
9.4.2 | www.gdandtbasics.com/total-runout/ |


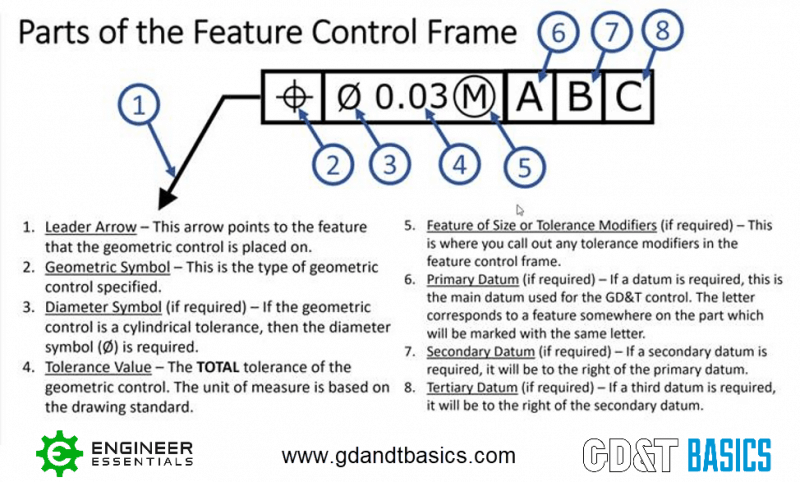
このセクションでは、フィーチャーコントロールフレームの概念についても紹介します。 フィーチャーコントロールフレームとは、幾何学的なトレランスを作成するためのシンボル、トレランス値、モディファイア、データムリファレンスを囲む長方形のボックスのことです。
SECTION 4 – DATUM REFERENCE FRAMES
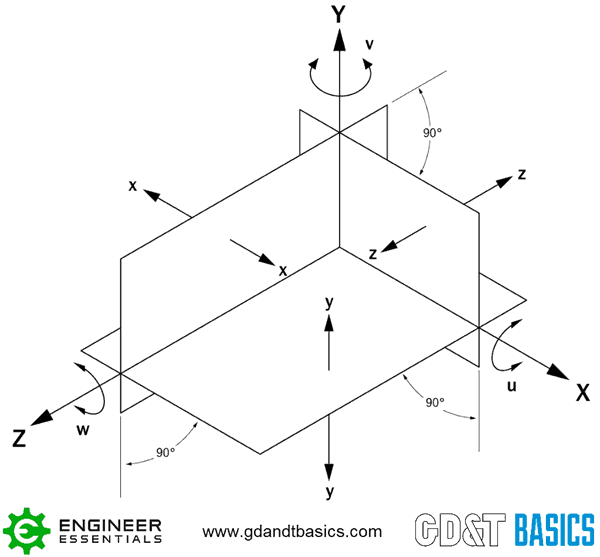
データムフィーチャの選択と参照に関するルールは、このセクションで詳しく説明されています。 多くの例を挙げて説明します。 データムとは、理論的に正確な点、線、または面のことです。 GD&Tでは、1つまたは複数のデータムが設定され、それに関連して他のフィーチャーが指定されます。 データムの基準がないと、部品は3つの空間方向に動いたり、3つの軸を中心に回転したりします。 この6つの動きを「自由度」と呼ぶ。 データムを参照することで、これらの自由度を制限することができます。
Section 5 THROUGH 9 – TYPES OF TOLERANCES AND GEOMETRIC CHARACTERISTICS
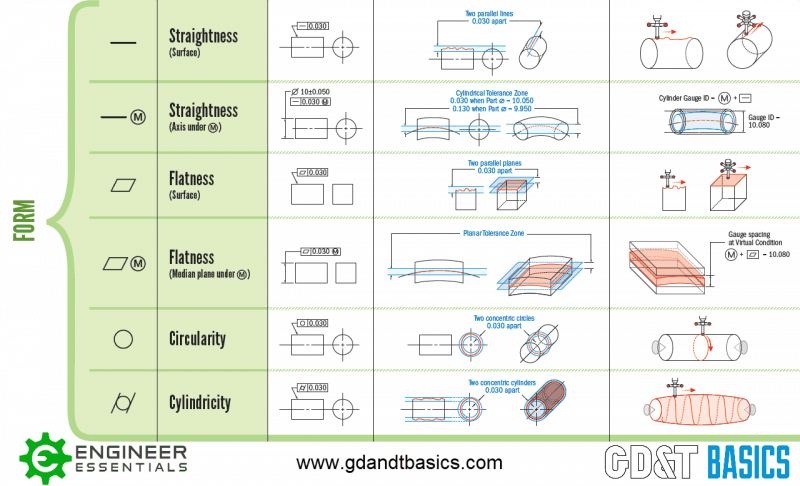
これらのセクションでは、5つの基本的な公差のタイプの1つを取り上げています。 各許容差の種類には、いくつかの幾何学的特性が定義されています。 上の図3-1は、これらの特性の構成と、対応する記号を示しています。
Section 5 FORM
このセクションでは、真直度、平面度、真円度、円筒度の許容差を正しく記述する方法を説明します。 これらの許容差は、サイズの許容差では部品の形状を十分に管理できない場合に使用されます。 形状許容差はデータムには適用されません。
Section 6 – ORIENTATION
角度、垂直度、平行度の3つの方向性があります。 これらの許容差は、データムに対するフィーチャーの回転を制御するために使用されます。 位置の制御には使用できません。

Section 7 – LOCATION
位置、同心性、対称性は3種類のロケーションの許容範囲です。 これらは、フィーチャーの相互関係やデータムに対する位置を制御するために使用されます。
セクション8 – プロファイル
プロファイルとは、表面の輪郭と定義されます。 プロファイルの許容範囲には、表面のプロファイルと線のプロファイルの2種類があります。 線のプロファイルの許容差は、あらかじめ定義された理想的なサーフェスの断面に対するサーフェスの形状を制御します。 この場合、理想的な、または「真の」プロファイルは、2次元の形状として定義することができます。 サーフェス公差のプロファイルは、理想的な、つまり「真の」3次元のサーフェスに対するサーフェスの形状を制御するために使用されます。 規格にはこうあります。 “デジタルデータファイルまたは図面上の適切なビューが真のプロファイルを定義しなければならない」とあります。 プロファイルの形状と参照するデータムに応じて、プロファイルの許容値は、サイズ、形状、方向、および/または位置を制御することができます。
Section 9 – RUNOUT
ランアウトとは、データム軸を中心に回転させたときのサーフェスの変動を制御するために使用される公差です。 サーフェスは、データム軸に対して平行または垂直になります。 円形の振れは、振れの許容値が単一の面にのみ適用されることを示す用語で、全体の振れは、データム軸を中心とした回転対称性を持つすべての面に適用されることを示す用語です。
APPENDICES
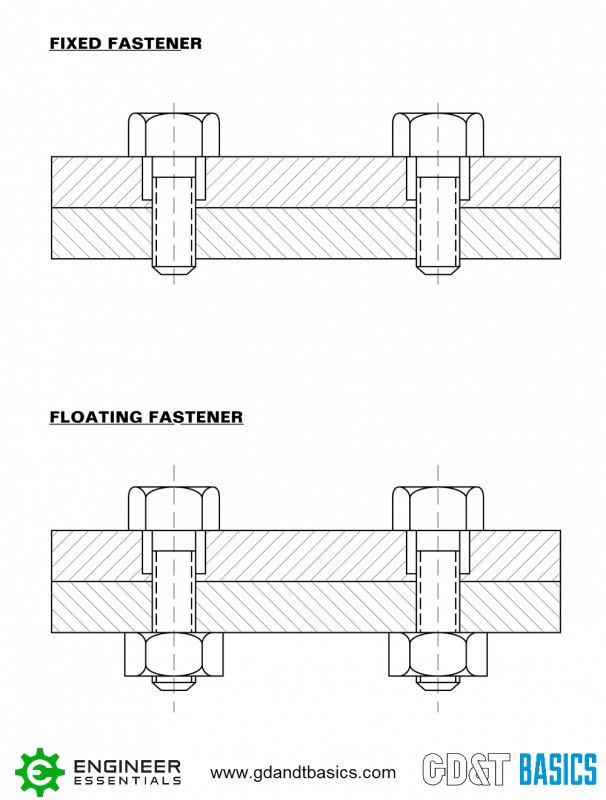
付録AからEには追加情報が含まれています。 例えば、付録AとDには、規格の旧バージョンからの変更点のログや、規格に含まれなくなった旧手順の概要が記載されています。 また、付録Bには嵌合部品の適合性を示す公式や定義が、付録CにはGD&T記号の描き方やISOとの相互参照が記載されています。
KEY TAKE-AWAYS
幾何学的寸法と許容差は、技術的な図面上の詳細な情報を伝えるために使用されます。 設計意図を正しく伝えるためには、GD&Tの標準化とその規格に関する知識が重要です。 ASME Y14.5は確立され、広く使用されているGD&T規格で、包括的なGD&Tシステムに必要な情報がすべて含まれています。
- ASME Y14.5規格は、幾何学的寸法と許容差のためのシンボル、定義、およびルールを確立しています。
- この規格の目的は、機械部品の設計や製造プロセスにおいて、詳細な情報を明確に伝達することです。
- この規格は4つのバージョンが発行されており、2009年のバージョンが最も広く使用されています。
- 規格は9つのパートで構成されており、幾何学的特性の詳細はパート5から9までに記載されています。