Neste artigo tutorial irá aprender como funciona um motor passo-a-passo. Iremos cobrir os princípios básicos de funcionamento de motores passo a passo, os seus modos de condução e os tipos de motores passo a passo por construção. Poderá ver o seguinte vídeo ou ler o artigo escrito.
Princípio de funcionamento
Motor passo-a-passo é um motor CC sem escovas que gira em passos. Isto é muito útil porque pode ser posicionado com precisão sem qualquer sensor de feedback, o que representa um controlador em circuito aberto. O motor passo-a-passo consiste num rotor que é geralmente um íman permanente e que está rodeado pelos enrolamentos do estator. À medida que activamos os enrolamentos passo a passo numa determinada ordem e deixamos fluir uma corrente através deles, estes magnetizarão o estator e farão pólos electromagnéticos, respectivamente, que provocarão a propulsão do motor. Assim’ o princípio básico de funcionamento dos motores passo-a-passo.
Driving Modes
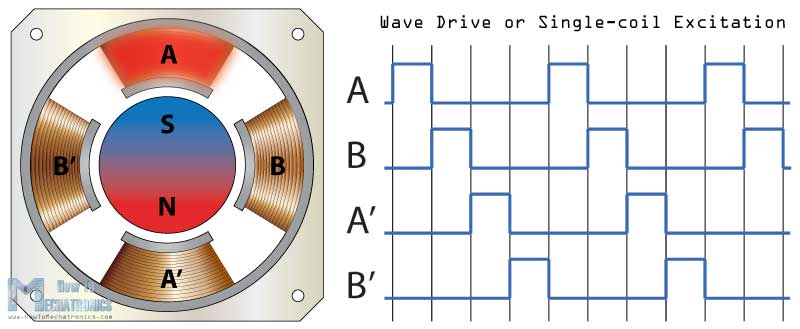
Existem várias maneiras diferentes de conduzir o motor passo-a-passo. A primeira é a Condução por Onda ou Excitação com um Único Corredor. Neste modo activamos apenas uma bobina de cada vez, o que significa que para este exemplo de motor com 4 bobinas, o rotor fará o ciclo completo em 4 passos.
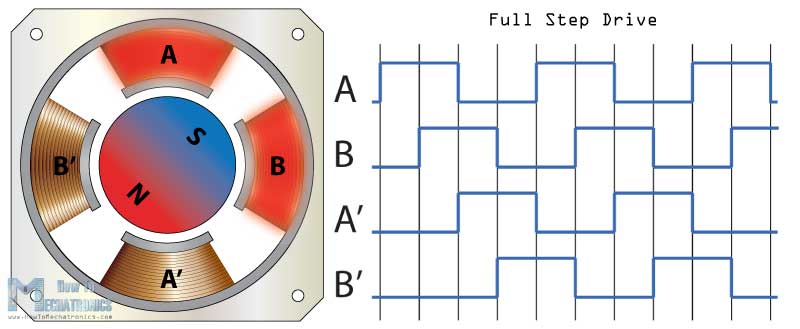
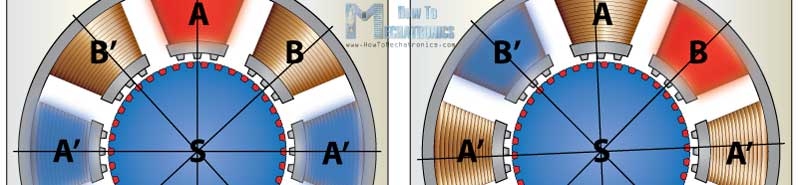
P>P>Próximo é o modo de Condução por Passo Completo que proporciona um binário de saída muito mais elevado porque temos sempre 2 bobinas activas num dado momento. No entanto, isto não melhora a resolução do stepper e novamente o rotor fará um ciclo completo em 4 passos.
Para aumentar a resolução do stepper usamos o modo Half Step Drive. Este modo é na realidade uma combinação dos dois modos anteriores.

Aqui temos uma bobina activa seguida por 2 bobinas activas e depois novamente uma bobina activa seguida por 2 bobinas activas e assim por diante. Assim, com este modo obtemos o dobro da resolução com a mesma construção. Agora o rotor fará o ciclo completo em 8 passos.
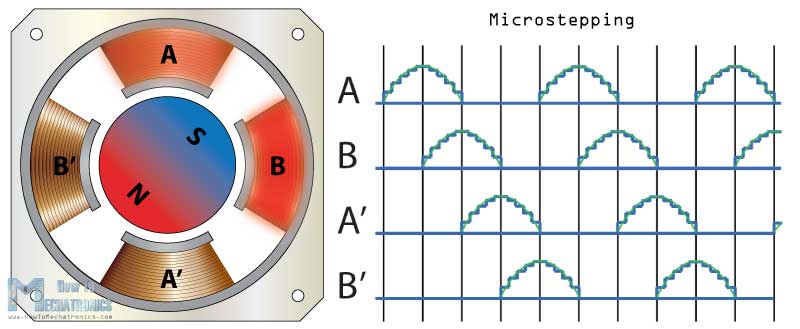
 No entanto, o método mais comum de controlar motores passo-a-passo actualmente é o Microstepping. Neste modo, fornecemos corrente controlada variável às bobinas sob a forma de onda de pecado. Isto proporcionará um movimento suave do rotor, diminuirá a tensão das peças e aumentará a precisão do motor passo-a-passo.
No entanto, o método mais comum de controlar motores passo-a-passo actualmente é o Microstepping. Neste modo, fornecemos corrente controlada variável às bobinas sob a forma de onda de pecado. Isto proporcionará um movimento suave do rotor, diminuirá a tensão das peças e aumentará a precisão do motor passo-a-passo.
Outra forma de aumentar a resolução do motor passo-a-passo é aumentando os números dos pólos do rotor e os números do pólo do estator.
Tipos de motores passo por construção
Por construção existem 3 tipos diferentes de motores passo-a-passo: motor passo-a-passo de íman permanente, motor passo-a-passo de relutância variável e motor passo-a-passo híbrido síncrono.
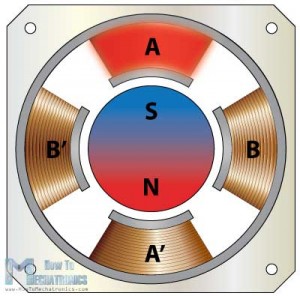
O passo de íman permanente tem um rotor de íman permanente que é accionado pelos enrolamentos dos estatores. Eles criam pólos de polaridade oposta em comparação com os pólos do rotor que impulsiona o rotor.
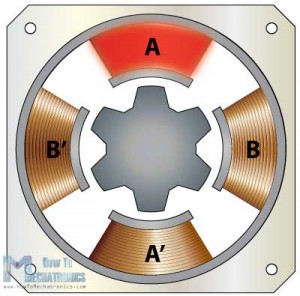
O tipo seguinte, o motor passo-a-passo Variable Reluctant utiliza um rotor de ferro macio não magnetizado. O rotor tem dentes que são deslocados do estator e à medida que activamos os enrolamentos numa determinada ordem, o rotor move-se respectivamente de modo a ter um gabarito mínimo entre o estator e os dentes do rotor
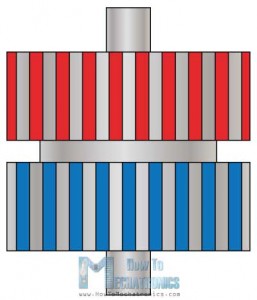
O Hybrid-Motor Síncrono é combinações dos dois passos anteriores. Tem rotor dentado de íman permanente e também um estator dentado. O rotor tem duas secções, que são opostas em polaridade e os seus dentes são deslocados como se mostra aqui.
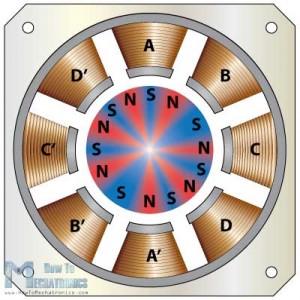
Esta é uma vista frontal de um motor passo-a-passo híbrido comummente utilizado que tem 8 pólos no estator que são activados por 2 enrolamentos, A e B. Assim, se activarmos o enrolamento A, magnetizaremos 4 pólos dos quais dois deles terão polaridade Sul e dois deles polaridade Norte.
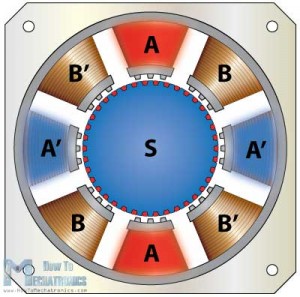
p>Vemos que de tal forma os dentes dos rotores estão alinhados com os dentes dos postes A e não alinhados com os dentes dos postes B. Isto significa que no passo seguinte, quando desligamos os postes A e activamos os postes B, o rotor moverá o contra-relógio e os seus dentes alinhar-se-ão com os dentes dos postes B.
Se continuarmos a activar os postes numa determinada ordem, o rotor mover-se-á continuamente. Aqui podemos também usar diferentes modos de condução como a condução por ondas, tracção integral, tracção por meio passo e microstepping para aumentar ainda mais a resolução do motor passo-a-passo.