En este artículo tutorial aprenderás cómo funciona un motor paso a paso. Cubriremos los principios básicos de funcionamiento de los motores paso a paso, sus modos de conducción y los tipos de motores paso a paso por construcción. Puedes ver el siguiente vídeo o leer el artículo escrito.
El motor paso a paso es un motor de corriente continua sin escobillas que gira por pasos. Es muy útil porque puede posicionarse con precisión sin ningún sensor de retroalimentación, lo que representa un controlador de bucle abierto. El motor paso a paso consta de un rotor que generalmente es un imán permanente y está rodeado por los devanados del estator. A medida que activamos los devanados paso a paso en un orden determinado y dejamos que fluya una corriente a través de ellos, magnetizarán el estator y formarán polos electromagnéticos respectivamente que provocarán la propulsión del motor. Así que ese’ el principio básico de funcionamiento de los motores paso a paso.
Modos de accionamiento
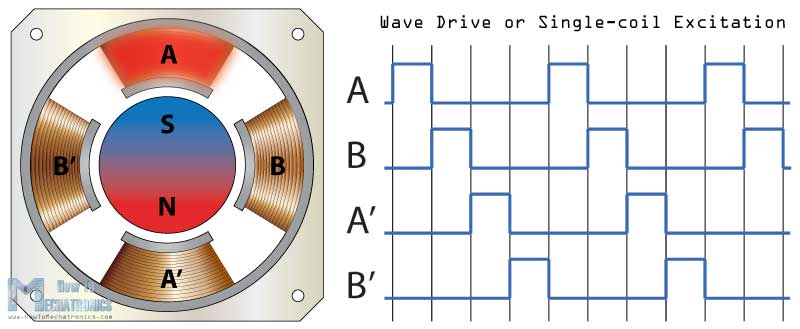
Hay varias formas diferentes de accionar el motor paso a paso. El primero es el Wave Drive o Excitación de una sola bobina. En este modo activamos sólo una bobina a la vez lo que significa que para este ejemplo de motor con 4 bobinas, el rotor hará el ciclo completo en 4 pasos.
El siguiente es el modo de accionamiento Full step que proporciona una salida de par mucho mayor porque siempre tenemos 2 bobinas activas en un momento dado. Sin embargo esto no mejora la resolución del stepper y de nuevo el rotor hará un ciclo completo en 4 pasos.

Para aumentar la resolución del stepper utilizamos el modo de accionamiento de medio paso. Este modo es en realidad una combinación de los dos modos anteriores.

Aquí tenemos una bobina activa seguida de 2 bobinas activas y de nuevo una bobina activa seguida de 2 bobinas activas y así sucesivamente. Así que con este modo obtenemos el doble de resolución con la misma construcción. Ahora el rotor hará un ciclo completo en 8 pasos.
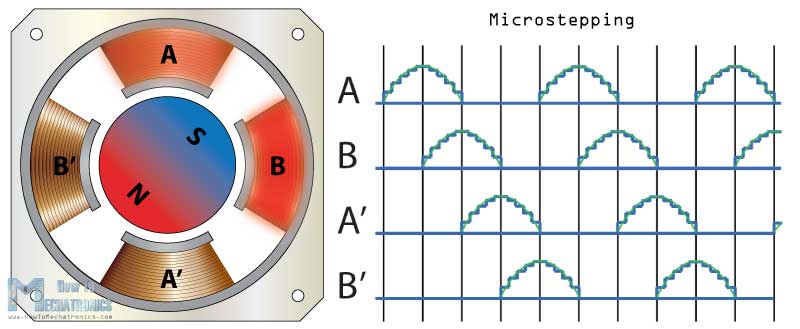
 Sin embargo, el método más común de controlar los motores paso a paso hoy en día es el Microstepping. En este modo proporcionamos una corriente variable controlada a las bobinas en forma de onda sinusoidal. Esto proporcionará un movimiento suave del rotor, disminuirá la tensión de las piezas y aumentará la precisión del motor paso a paso.
Sin embargo, el método más común de controlar los motores paso a paso hoy en día es el Microstepping. En este modo proporcionamos una corriente variable controlada a las bobinas en forma de onda sinusoidal. Esto proporcionará un movimiento suave del rotor, disminuirá la tensión de las piezas y aumentará la precisión del motor paso a paso.
Otra forma de aumentar la resolución del motor paso a paso es aumentando los números de los polos del rotor y los números de los polos del estator.

Tipos de motores paso a paso según su construcción
Por su construcción existen 3 tipos diferentes de motores paso a paso: paso a paso de imán permanente, paso a paso de reluctancia variable y motor paso a paso síncrono híbrido.
El motor paso a paso de imán permanente tiene un rotor de imán permanente que es impulsado por los devanados del estator. Crean polos de polaridad opuesta en comparación con los polos del rotor que impulsa el rotor.

El siguiente tipo, el motor paso a paso de reluctancia variable utiliza un rotor de hierro blando no magnetizado. El rotor tiene dientes que están desplazados del estator y a medida que activamos los devanados en un orden determinado el rotor se mueve respectivamente de forma que tiene el mínimo gab entre el estator y los dientes del rotor

El motor síncrono híbrido es una combinación de los dos motores paso a paso anteriores. Tiene un rotor dentado de imán permanente y también un estator dentado. El rotor tiene dos secciones, que son opuestas en polaridad y sus dientes están desplazados como se muestra aquí.

Esta es una vista frontal de un motor paso a paso híbrido de uso común que tiene 8 polos en el estator que son activados por 2 devanados, A y B. Así que si activamos el devanado A, magnetizaremos 4 polos de los cuales dos de ellos tendrán polaridad Sur y dos de ellos polaridad Norte.

Podemos ver que de tal manera los dientes de los rotores están alineados con los dientes de los polos A y desalineados con los dientes de los polos B. Esto quiere decir que en el siguiente paso cuando apaguemos los polos A y activemos los polos B, el rotor se moverá en sentido contrario a las agujas del reloj y sus dientes se alinearán con los dientes de los polos B.

Si seguimos activando los polos en un orden determinado el rotor se moverá continuamente. Aquí también podemos utilizar diferentes modos de conducción como el accionamiento de onda, el accionamiento de paso completo, el accionamiento de medio paso y el microstepping para aumentar aún más la resolución del motor paso a paso.